

库卡机器人用减速机演化史
人类手臂最重要的是各个关节、韧带,而机器人最重要的就是每个关节中的:减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。
机器人关节的运动,最早是从液压机构驱动开始的,经过一系列科技的发展和创新,才形成了今天我们所看到的减速机。
液压机构
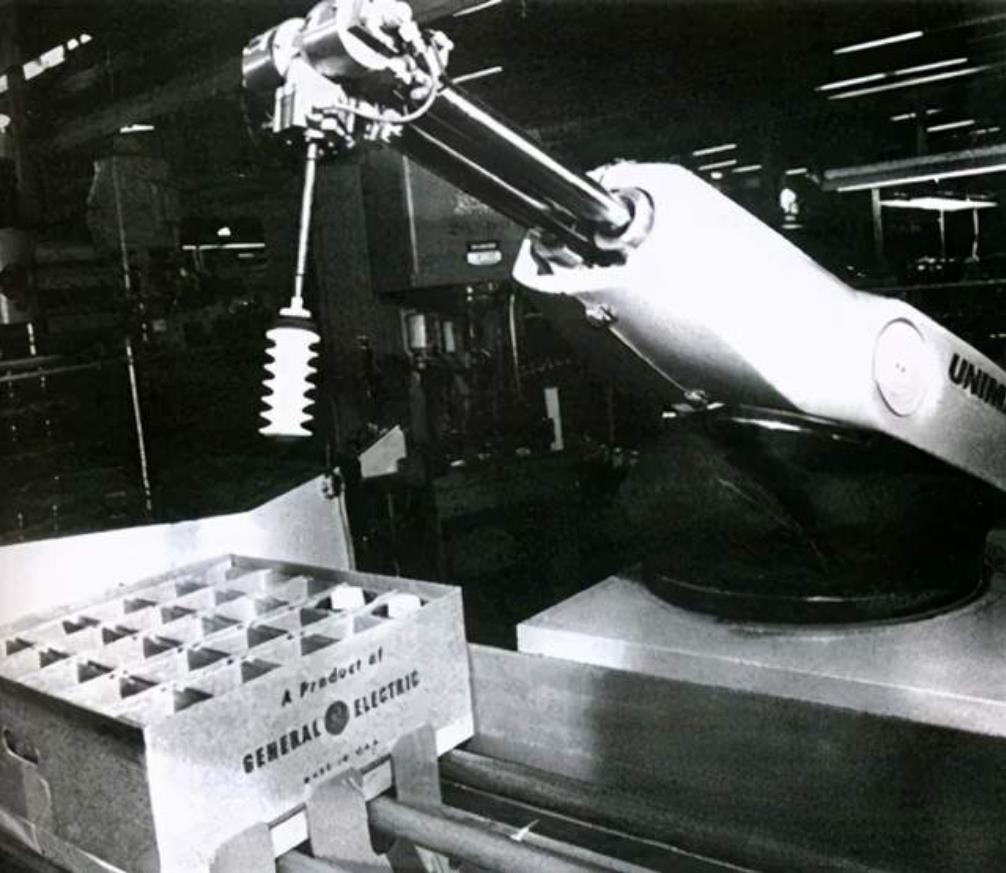
1959 年,世界上第一条工业机械臂被研制出来,利用了很多液压机构来驱动机器人关节的运动。这是工业史上的一大创举,终于有一种灵活的机器可以替代人工机械式的劳动。
电动机
1973 年,KUKA 改进了工业机器人的结构,6 个关节全部用电动机控制,这使得机器人的结构更加紧凑,关节动作更加灵活,工作范围大大增加。

电动机+液压机构
在制造机器人的道路上 KUKA 不断创新改良,随后,KUKA 改造了机器人的驱动结构:由电动机驱动 6 个关节,并用液压机构助力以增加负载能力,2 号和 3 号轴中加入丝杆螺母传动大大提高了重复精度。

谐波减速机
1989 年,世界格局发生了巨大变化。有一种减速机从冷战的高墙之内解禁出来,很快被用在民用工业机器人上。负载能力与精度兼备之下,机器人结构变得十分简洁,运行非常灵活。这款神奇的减速机就是大名鼎鼎的“谐波减速机”(Harmonic Drive)。
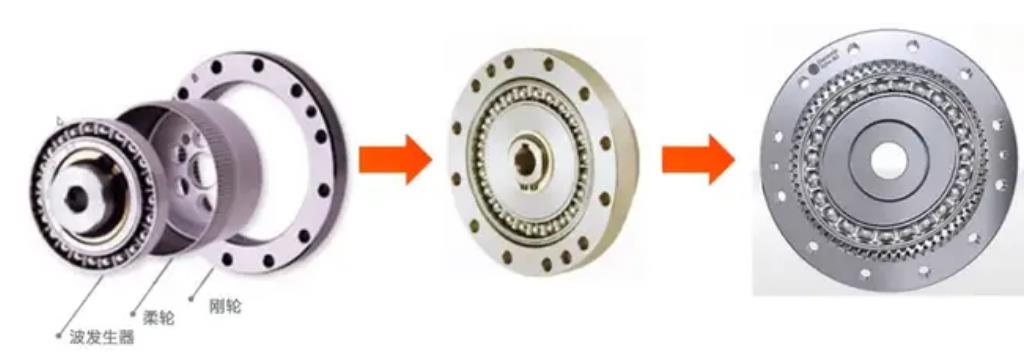
谐波减速机的结构十分简单,是由波发生器、柔轮、刚轮三部分组成。其原理是利用柔轮与刚轮的齿数差,以及柔轮在运行时的可控形变来达到减速与传递动力的目的。
自重轻、体积小、减速比高、传动力矩大、反向间隙小、精度高、运行平滑效率高等诸多优点使得谐波减速机在上世纪 80 年代末,90 年代初被广泛使用在机器人身上。
RV 减速机
科技飞速发展,紧接着另一种减速机进入了机器人研发工程师的视线——RV 减速机(Rotary Vector Drive)。RV 减速机是行星减速机与摆线轮减速机的结合。利用行星轮轴的偏心驱动力使得摆线盘在外圈上摆动,达到减速与动力传递的目的。它既有行星减速机减速比变化范围大的特点又有摆线轮反向间隙小、传动力矩大的特点。而且体积相对较小,十分适合安装在机器人上使用。
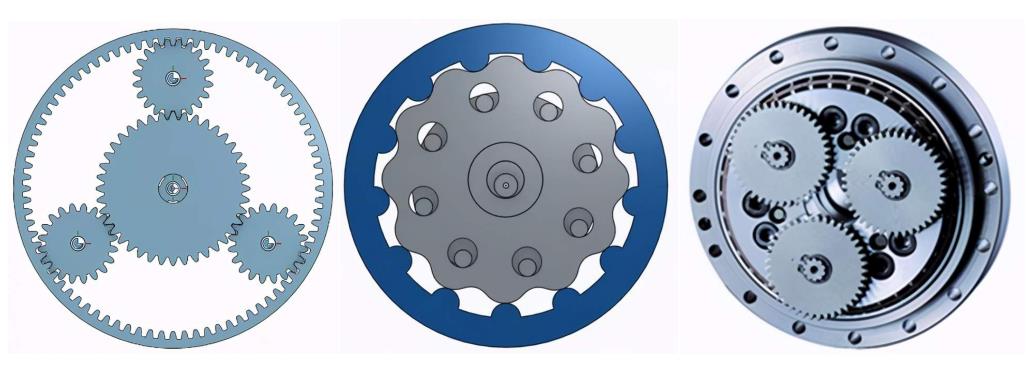
行星减速机(左) 摆线轮减速机(中) RV 减速机(右)
划重点:
谐波减速机更轻,所以目前 KUKA 的小机器人(KR 6 Agilus, KR 10 Agilus, LBR iiwa)采用谐波减速机。
RV 减速机更耐冲击,所以 KUKA 较大体型的机器人都采用 RV 减速机。也有个别机器人身上两种都有(KR 3 Agilus)。

-

再看中国制造2025“制造强国”战略。
重温中国制造2025“制造强国”战略纲领。该计划于2015年5月19日由国务院正式印发。通过“三步走”实现制造强国的战略目标:第一步,到2025年迈入制造强国行列;第二步,到2035年中国制造业整体达到世界制造强国阵营中等水平;第三步,到新中国成立一百年时,综合实力进入世界制造强国前列。
넶107 2022-03-15 -

消防知识常抓不懈,安全演练警钟长鸣
为提高员工的消防安全意识和面对突发事件的应急处理能力,提高紧急救援反应速度和协调能力,确保能迅速、高效、有序地开展突发事件应急求援工作,同时验证公司应急救援预案的有效性。
넶116 2021-12-29 -

-

围绕工业机器人核心部件--谐波减速器,世界巨头遭遇本土企业追赶
精密减速器厂商日本哈默纳科(Harmonic Drive Systems)的中长期增长前景正在浮现。工业用小型机器人已进入食品製造、医疗和物流等领域。哈默纳科在用于可搬重量10公斤以下机器人的减速器领域掌握8成份额,对于哈默纳科来説,良机已经到来,但在其背后,正在传来不断追赶的中国企业的脚步声。
넶80 2021-12-14







